Karnaugh Maps: A Visual Tool for Boolean Function Simplification in Discrete Mathematics
Related Articles: Karnaugh Maps: A Visual Tool for Boolean Function Simplification in Discrete Mathematics
Introduction
With enthusiasm, let’s navigate through the intriguing topic related to Karnaugh Maps: A Visual Tool for Boolean Function Simplification in Discrete Mathematics. Let’s weave interesting information and offer fresh perspectives to the readers.
Table of Content
- 1 Related Articles: Karnaugh Maps: A Visual Tool for Boolean Function Simplification in Discrete Mathematics
- 2 Introduction
- 3 Karnaugh Maps: A Visual Tool for Boolean Function Simplification in Discrete Mathematics
- 3.1 Understanding Boolean Functions and their Simplification
- 3.2 The Essence of Karnaugh Maps
- 3.3 Construction of Karnaugh Maps
- 3.4 Grouping and Simplification
- 3.5 Illustrative Example
- 3.6 Advantages of Karnaugh Maps
- 3.7 Limitations of Karnaugh Maps
- 3.8 FAQs about Karnaugh Maps
- 3.9 Tips for Using Karnaugh Maps
- 3.10 Conclusion
- 4 Closure
Karnaugh Maps: A Visual Tool for Boolean Function Simplification in Discrete Mathematics

Karnaugh maps, often abbreviated as K-maps, are a visual representation of Boolean functions used in digital logic design and discrete mathematics. They provide a systematic and intuitive method for simplifying Boolean expressions, leading to optimized circuit designs with reduced complexity and cost. This article delves into the intricacies of K-maps, exploring their construction, application, and significance in the realm of discrete mathematics.
Understanding Boolean Functions and their Simplification
Boolean functions are mathematical expressions that operate on binary variables (0 or 1) and produce a binary output. These functions are fundamental in digital logic, representing the behavior of logic gates and circuits. Simplification of Boolean expressions is crucial for several reasons:
- Reduced Circuit Complexity: A simplified Boolean expression translates to a circuit with fewer logic gates, leading to a smaller, more cost-effective design.
- Improved Performance: Circuits with fewer gates exhibit lower propagation delays, resulting in faster processing speeds.
- Enhanced Readability: Simplified expressions are easier to understand and analyze, facilitating debugging and maintenance.
The Essence of Karnaugh Maps
K-maps offer a graphical approach to Boolean function simplification. They visualize the function’s output for all possible input combinations in a structured grid. Each cell in the grid represents a unique input combination, and the cell’s value corresponds to the function’s output for that input.
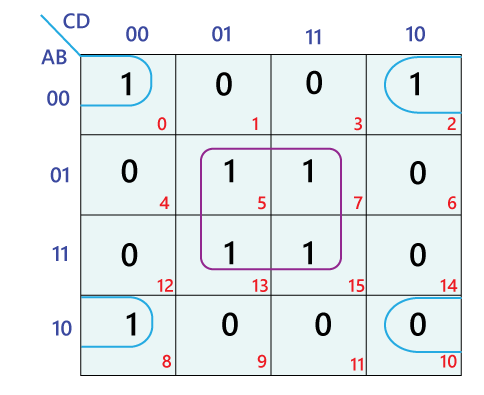
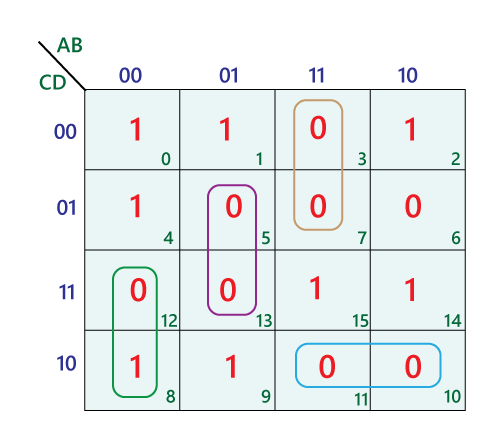
The key to K-map simplification lies in identifying adjacent cells with the same output value (either ‘1’ or ‘0’). These adjacent cells form groups, representing terms that can be combined to simplify the Boolean expression. The larger the group, the simpler the resulting term.
Construction of Karnaugh Maps
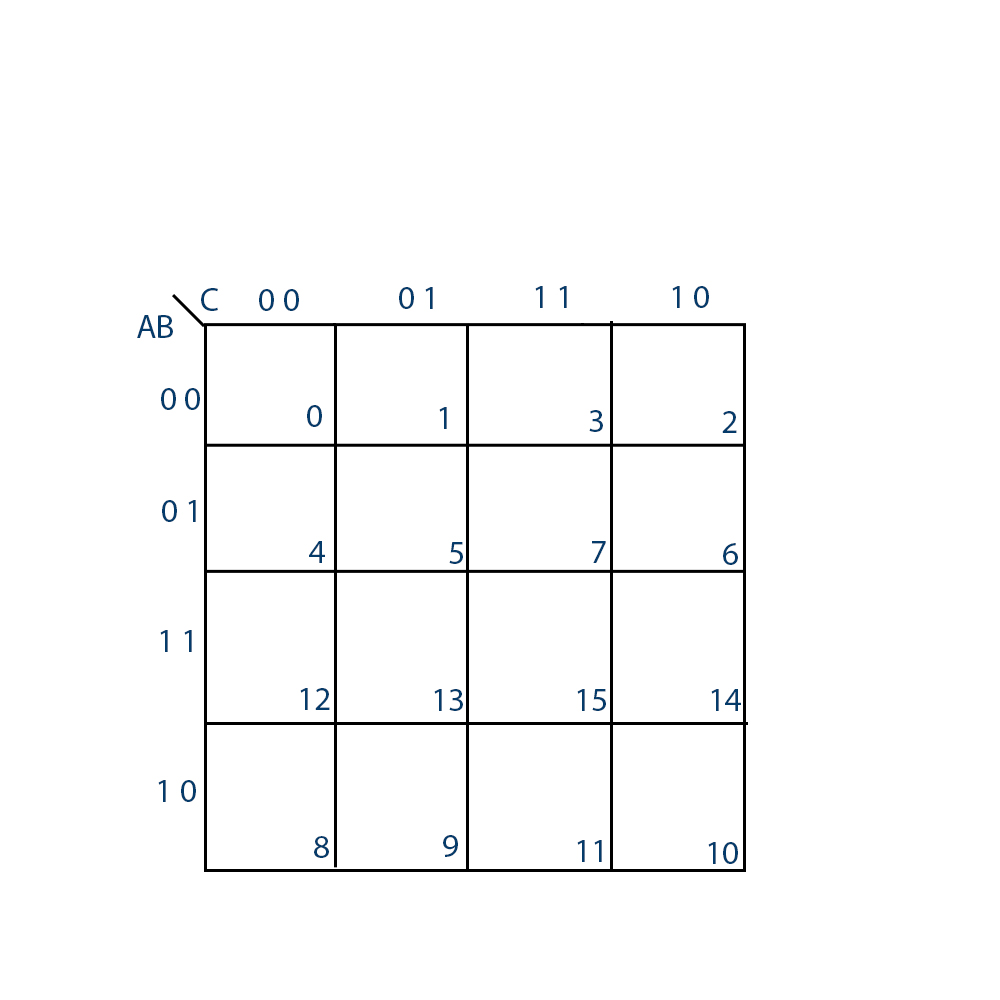
The construction of a K-map depends on the number of input variables in the Boolean function. For a function with ‘n’ input variables, the K-map will have 2^n cells arranged in a rectangular grid. The grid’s rows and columns are labeled with binary codes representing the input variable combinations, following a specific pattern known as Gray code. Gray code ensures that adjacent cells in the K-map differ in only one input variable, facilitating the identification of groups.
Example: A K-map for a function with three input variables (A, B, C) would have 2^3 = 8 cells arranged in a 2×4 grid. The rows and columns would be labeled as follows:
| 00 | 01 | 11 | 10 | |
|---|---|---|---|---|
| 0 | 000 | 001 | 011 | 010 |
| 1 | 100 | 101 | 111 | 110 |
Grouping and Simplification
Once the K-map is constructed, the next step is to identify groups of adjacent cells with the same output value. These groups must adhere to the following rules:
- Adjacent Cells: Cells are considered adjacent if they share a common edge, even if they are on opposite ends of the map.
- Group Size: Groups must be of size 2^n (1, 2, 4, 8, etc.) to represent a simplified term.
- Maximum Group Size: The goal is to form the largest possible groups, as they lead to simpler terms.
- Overlapping Groups: Groups can overlap, and cells can belong to multiple groups.
Each group corresponds to a term in the simplified Boolean expression. The term’s variables are determined by the input variables that remain constant within the group. For example, a group covering cells with input combinations ‘000’, ‘001’, ‘100’, and ‘101’ represents a term with ‘A’ as the variable, as ‘A’ is the only variable that remains constant across these cells.
Illustrative Example
Consider the Boolean function:
F(A, B, C) = Σ(0, 1, 2, 4, 5, 6)
This function represents a sum-of-minterms expression, where the sum is over the minterms (input combinations) for which the function output is ‘1’. The K-map for this function is:
| 00 | 01 | 11 | 10 | |
|---|---|---|---|---|
| 0 | 1 | 1 | 0 | 1 |
| 1 | 1 | 1 | 0 | 1 |
The K-map shows that there are two groups: one covering cells ‘000’, ‘001’, ‘100’, and ‘101’ (representing the term ‘A’), and another covering cells ‘000’, ‘010’, ‘100’, and ‘110’ (representing the term ‘B’). Therefore, the simplified Boolean expression for this function is:
F(A, B, C) = A + B
Advantages of Karnaugh Maps
- Intuitive Visual Representation: K-maps provide a visual representation of the Boolean function, making it easier to grasp the relationship between input combinations and output values.
- Systematic Simplification: The grouping process in K-maps is systematic and follows specific rules, ensuring that the resulting expression is simplified optimally.
- Reduced Complexity: K-maps effectively reduce the complexity of Boolean expressions, leading to simpler and more efficient circuits.
- Ease of Implementation: K-maps are relatively simple to understand and implement, making them a valuable tool for both beginners and experienced designers.
Limitations of Karnaugh Maps
- Limited Scalability: K-maps become increasingly complex and difficult to use for functions with more than five or six input variables.
- Don’t Care Conditions: Handling don’t care conditions (input combinations for which the output is unspecified) in K-maps can be challenging.
- Limited to Sum-of-Products Forms: K-maps are primarily used for simplifying Boolean expressions in sum-of-products form.
FAQs about Karnaugh Maps
Q: What is the significance of Gray code in K-maps?
A: Gray code ensures that adjacent cells in the K-map differ in only one input variable. This property is crucial for identifying groups of adjacent cells, as it allows for easy visualization of the input variables that remain constant within a group.
Q: How do you handle don’t care conditions in K-maps?
A: Don’t care conditions can be represented as ‘X’ in the K-map. When forming groups, these cells can be included or excluded depending on whether they contribute to a larger group and a simpler expression.
Q: Can K-maps be used for product-of-sums expressions?
A: While K-maps are primarily used for sum-of-products forms, they can be adapted for product-of-sums expressions by using a "maxterm" representation instead of minterms. This involves identifying the input combinations where the function output is ‘0’ and forming groups accordingly.
Q: What are some alternative methods for Boolean function simplification?
A: Other methods for simplifying Boolean expressions include:
- Boolean Algebra: Using the axioms and theorems of Boolean algebra to manipulate expressions.
- Quine-McCluskey Algorithm: A tabular method for simplifying expressions that is more systematic than K-maps and can handle larger functions.
- Espresso Algorithm: A computer-based algorithm that uses a heuristic approach to find optimal simplifications.
Q: What are some real-world applications of K-maps?
A: K-maps are widely used in various fields, including:
- Digital Logic Design: Simplifying circuits for logic gates, multiplexers, decoders, and other digital components.
- Computer Architecture: Designing and optimizing control units and data paths in processors.
- Embedded Systems: Implementing logic functions in microcontrollers and other embedded systems.
- Robotics: Controlling actuators and sensors in robotic systems.
Tips for Using Karnaugh Maps
- Start with a Clear Understanding of the Boolean Function: Define the function’s input variables, output value, and the desired form of the expression (sum-of-products or product-of-sums).
- Construct the K-map Carefully: Ensure that the rows and columns are labeled correctly using Gray code.
- Identify Groups Systematically: Look for groups of adjacent cells with the same output value, starting with the largest possible groups.
- Use Don’t Care Conditions Strategically: Include or exclude don’t care conditions to maximize group size and simplify the expression.
- Verify the Result: After simplifying the expression, verify its correctness by testing it against all possible input combinations.
Conclusion
Karnaugh maps serve as a powerful tool in discrete mathematics, particularly in the field of digital logic design. They offer a visual and intuitive approach to simplifying Boolean expressions, leading to optimized circuits with reduced complexity and improved performance. While K-maps have limitations in terms of scalability and handling don’t care conditions, they remain a valuable tool for designers seeking to create efficient and reliable digital systems. Their simplicity, ease of use, and visual nature make them an invaluable asset for understanding and manipulating Boolean functions, contributing significantly to the advancement of digital technologies.


![[#2] Karnaugh Map to Simplify Boolean Function. Three Boolean Variable - YouTube](https://i.ytimg.com/vi/asbC8z6d67w/maxresdefault.jpg)
Closure
Thus, we hope this article has provided valuable insights into Karnaugh Maps: A Visual Tool for Boolean Function Simplification in Discrete Mathematics. We hope you find this article informative and beneficial. See you in our next article!