Understanding Grid Maps: A Comprehensive Guide
Related Articles: Understanding Grid Maps: A Comprehensive Guide
Introduction
In this auspicious occasion, we are delighted to delve into the intriguing topic related to Understanding Grid Maps: A Comprehensive Guide. Let’s weave interesting information and offer fresh perspectives to the readers.
Table of Content
Understanding Grid Maps: A Comprehensive Guide
Grid maps are a fundamental data structure in robotics and computer vision, particularly in applications involving navigation and environment mapping. They provide a structured representation of an environment, allowing for efficient analysis and decision-making. This article delves into the concept of grid maps, focusing on their construction, interpretation, and practical applications.
Grid Map Fundamentals
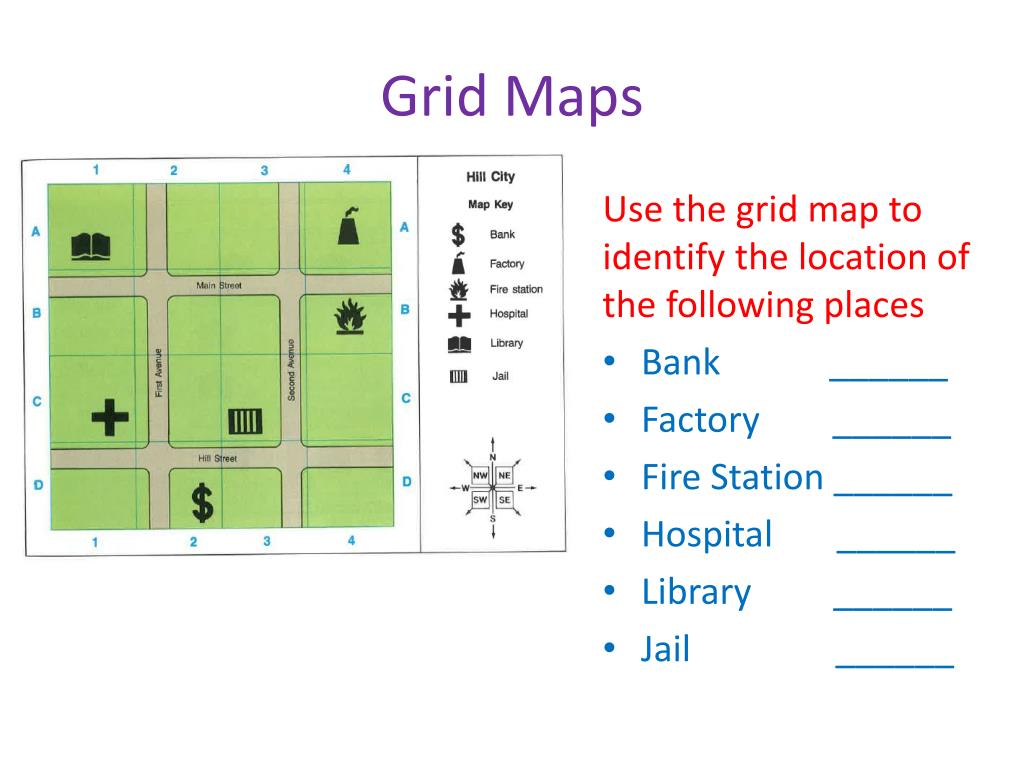
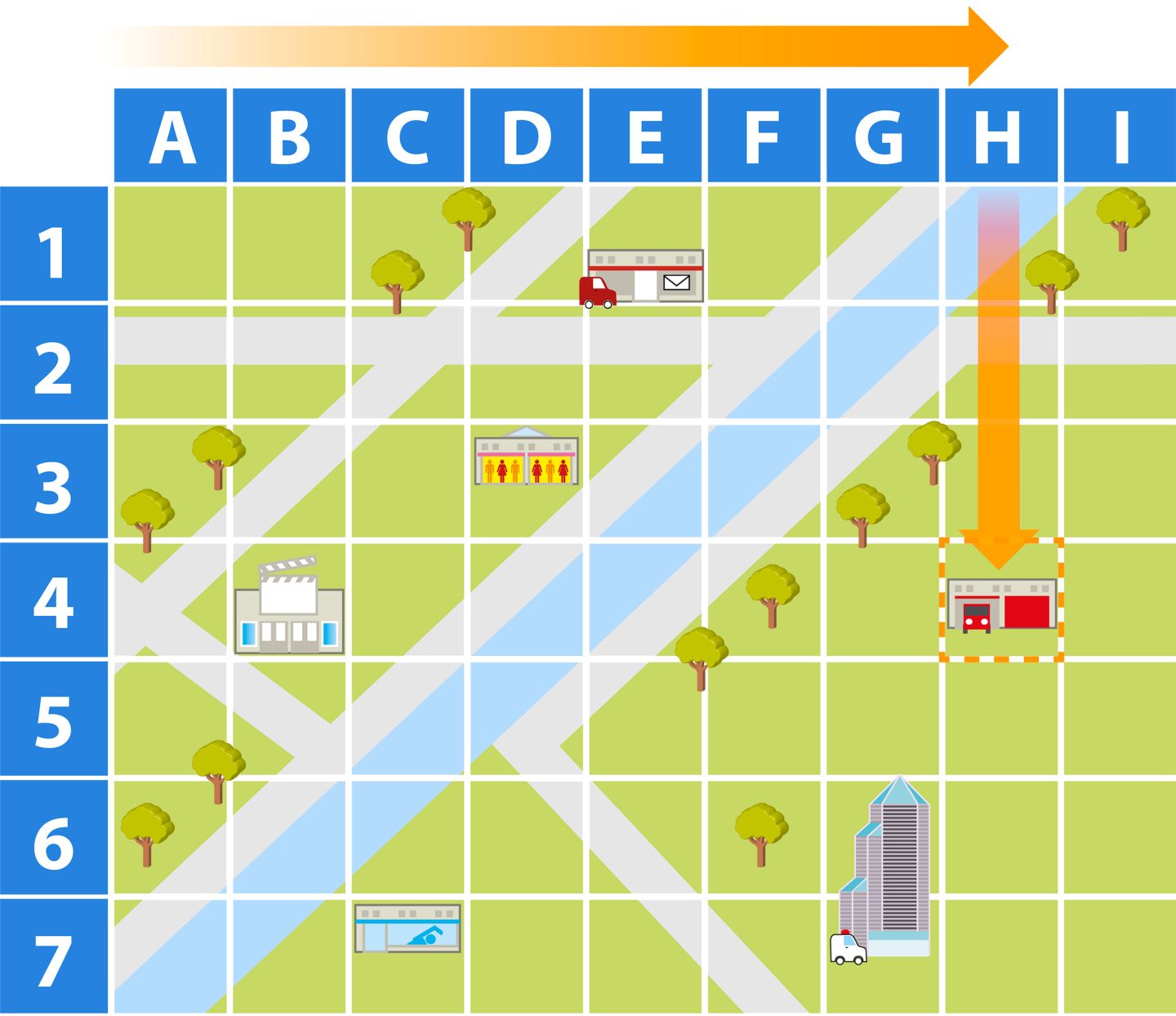
A grid map is a two-dimensional representation of an environment, where the space is divided into a regular grid of cells. Each cell in the grid represents a specific location in the real world and is assigned a value that reflects its properties. The value can be binary, representing occupancy (occupied or free), or continuous, representing attributes like elevation, temperature, or probability of occupancy.
Grid Map Construction
The process of constructing a grid map involves several steps:
- Sensor Data Acquisition: This step involves acquiring data from sensors like LiDAR, cameras, or sonar, which provide information about the environment.
- Data Preprocessing: Raw sensor data is often noisy and requires preprocessing to remove outliers, filter noise, and align the data with a specific coordinate frame.
- Grid Cell Assignment: The processed data is then projected onto the grid, assigning values to each cell based on the sensor readings. This involves determining which cells are occupied or free based on the sensor data.
- Occupancy Estimation: For binary grid maps, the occupancy value for each cell is often estimated using probabilistic methods like Bayesian filtering or particle filters. These methods consider the sensor data and prior knowledge to provide a more robust estimate of the environment’s state.
Grid Map Resolution and Size
The resolution of a grid map refers to the size of each cell, which determines the level of detail captured. A higher resolution map (smaller cells) provides more precise information but requires more memory and processing power. Conversely, a lower resolution map (larger cells) requires less computational resources but sacrifices detail.
The size of the grid map is determined by the area of the environment being mapped. It should be large enough to encompass the entire area of interest while maintaining an appropriate resolution.
Types of Grid Maps
Grid maps can be categorized based on the data they represent:
- Occupancy Grid Maps: These maps represent the presence or absence of obstacles in the environment, assigning binary values (0 for free, 1 for occupied) to each cell.
- Elevation Maps: These maps represent the height or elevation of each cell, providing a three-dimensional representation of the environment.
- Probabilistic Occupancy Grid Maps: These maps represent the probability of each cell being occupied, providing a more nuanced representation of uncertainty in the environment.
- Semantic Grid Maps: These maps incorporate semantic information about the environment, such as object labels (e.g., wall, door, table), allowing for more intelligent navigation and interaction.
Applications of Grid Maps
Grid maps find applications in various fields, including:
- Robotics: Navigation, path planning, and obstacle avoidance for autonomous robots.
- Computer Vision: Scene understanding, object recognition, and localization.
- Autonomous Driving: Environment mapping, lane detection, and obstacle detection for self-driving vehicles.
- Virtual Reality and Augmented Reality: Creating realistic and immersive environments.
- Geographic Information Systems (GIS): Representing geographic features and analyzing spatial data.
Advantages of Grid Maps
Grid maps offer several advantages over other data structures:
- Simplicity: They provide a simple and intuitive representation of the environment, making them easy to understand and manipulate.
- Efficiency: The grid structure allows for efficient algorithms for navigation, path planning, and collision detection.
- Flexibility: They can represent various types of data, including occupancy, elevation, and semantic information.
- Scalability: They can be scaled to represent environments of different sizes and resolutions.
Limitations of Grid Maps
Despite their advantages, grid maps have some limitations:
- Memory Consumption: High-resolution grid maps can consume significant memory, particularly for large environments.
- Computational Complexity: Processing and updating large grid maps can be computationally expensive.
- Data Discretization: The grid structure introduces discretization errors, which can affect the accuracy of navigation and path planning.
- Inability to Represent Complex Shapes: Grid maps may struggle to represent complex shapes accurately, particularly at low resolutions.
FAQs
Q: What are the different types of grid map representations?
A: Grid maps can be represented in various ways, including:
- Binary Grid Maps: Each cell is assigned a value of 0 or 1, representing free or occupied space.
- Probabilistic Occupancy Grid Maps: Each cell is assigned a probability value between 0 and 1, representing the likelihood of occupancy.
- Elevation Maps: Each cell represents the height or elevation of the corresponding location.
- Semantic Grid Maps: Each cell is assigned a label representing its semantic information, such as object type or function.
Q: How are grid maps used in robotics?
A: Grid maps are fundamental in robotics for:
- Navigation: Robots use grid maps to plan paths and avoid obstacles.
- Localization: Robots can estimate their position in the environment using grid maps.
- Mapping: Robots can build grid maps of their surroundings using sensor data.
Q: What are the advantages of using grid maps over other data structures?
A: Grid maps offer advantages such as:
- Simplicity: They are easy to understand and implement.
- Efficiency: They allow for efficient algorithms for navigation and path planning.
- Flexibility: They can represent various types of data, including occupancy, elevation, and semantic information.
- Scalability: They can be scaled to represent environments of different sizes and resolutions.
Tips
- Choose the appropriate resolution: Consider the trade-off between accuracy and computational resources.
- Use appropriate data structures: Select the most suitable grid map representation based on the application requirements.
- Utilize efficient algorithms: Employ efficient algorithms for grid map construction, update, and query operations.
- Integrate with other sensors: Combine grid maps with other sensor data for richer environment understanding.
Conclusion
Grid maps are a powerful tool for representing and understanding environments in robotics, computer vision, and other related fields. They provide a structured and efficient representation of space, allowing for efficient analysis and decision-making. By understanding the principles of grid map construction, interpretation, and application, researchers and engineers can leverage this powerful tool to develop innovative solutions for a wide range of problems.



Closure
Thus, we hope this article has provided valuable insights into Understanding Grid Maps: A Comprehensive Guide. We appreciate your attention to our article. See you in our next article!